ویدیوی بعدی
ویدیوهای پیشنهادی
ربات ماژولار SMORES-EP از شکاف ها عبور میکند

رباتها معمولا محدودیتهای خود را میشناسند اما به این معنی نیست که آنها را میپذیرند. این ربات از ابزارهایی برای توسعهی قابلیتهای خود استفاده میکند و با اشیای مجاور خود مسیرها و پلهایی را برای عبور خود میسازد. دیدن تلاش این ربات لذتبخش و درعینحال نگرانکننده است.
پژوهشگرهای کرنل و دانشگاه پنسیلوانیا اخیرا موفق به ساخت رباتی شدهاند که از اشیای اطراف خود برای انجام یک وظیفهی خاص کمک میگیرد. از آنجا که بخشهای مختلف این ربات از یکدیگر جدا میشوند و میتوانند بهصورت مستقل عمل کنند این ربات مثل مجموعهای از چند ربات است؛ اما در اینجا بحث سر تعدد یا واحد بودن سیستمهای ماژولار رباتیک نیست!
SMORES-EP رباتی است که پژوهشگرها یک مجموعهی تعریفشده از اطلاعات را به آن دادهاند. این ربات با دوربین کوچک خود به بررسی محیط میپردازد و بر همین اساس دادههای مفیدی مثل غلتاندن یک شیء یا عبور از یک شکاف را دریافت میکند.
این ربات از روش تعامل با اشیای خاص و عملکرد آنها هم آگاه است؛ برای مثال میتواند از آهنرباهای تعبیهشدهی خود برای باز کردن یک کشو یا از یک سطح شیبدار برای بالا رفتن از یک شیء تا یک ارتفاع مشخص استفاده کند.
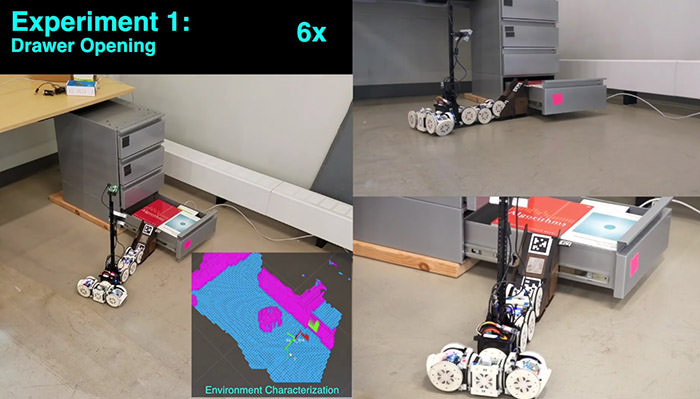
یک سیستم برنامهریزی سطح بالا قطعات ربات را بر اساس اطلاعات دادهشده هدایت میکند البته لازم نیست هر بخش ربات این دانش را داشته باشد. برای مثال برنامهریز ربات با دریافت دستور یافتن اشیای موجود در کشو میداند که برای انجام این کار باید کشو را باز کند؛ ربات آهنربایی باید از یک زاویهی مشخص به کشو بچسبد تا بتواند آن را باز کند و اگر نیاز به یک شیء دیگر مثلا یک سطح شیبدار داشته باشد آن را هم کنترل میکند و در محل مناسب قرار میدهد. ویدئوی زیر آزمایش سیستم رباتی را نشان میدهد، در این آزمایش ربات باید یک وظیفهی سطح بالا را با استفاده از قالب محدود اما پیچیدهای از اطلاعات انجام دهد.
در این ویدئو، از ربات خواسته میشود در کشوها به دنبال اشیای مشخصی بگردد. اشیای موردنظر در کشوری اول وجود ندارند، بنابراین انتظار میرود کشوی بعدی را باز کند؛ اما این کشو در ارتفاع بالاتری قرار دارد بنابراین باید به بالای کشوی اول برود که از شانس خوب ربات پر از کتاب و دارای یک لبهی برآمده است. برنامهریز ربات مشاهده میکند یک سطح شیبدار در نزدیکی ربات قرار دارد و به او دستور میدهد آن را در محل موردنظر قرار دهد و سپس بخشی از ربات برای بالا رفتن و باز کردن کشو بالا میرود، درحالیکه بخش دیگر از دوربین خود برای بررسی محتویات کشو استفاده کرده و درنهایت هدف پیدا میشود!
در عملیات بعدی، ربات باید از شکاف بین دو میز عبور کند. خوشبختانه، اشیایی در اطراف آن وجود دارد که میتواند به عنوان پل از آنها استفاده کند. ربات پس از بررسی صحنه پل را در محل موردنظر قرار میدهد و به سمت هدف حرکت میکند. این نمونهها به نظر آماده میرسند اما این فقط به توانایی ربات وابسته نیست بلکه به دستور موردنظر برای ساخت یک پل خوب هم وابسته است. ایدهی اصلی ساخت این ربات، ساخت سیستمهایی است که ازنظر منطقی و بر اساس دادههای جهان واقعی به موقعیتهای واقعی نزدیک شوند و با اشیای واقعی مسئله را حل کنند. توانایی ساخت یک پل از ابتدا خوب است اما تا زمانی که ندانید پل را برای چه کاری میسازید، چه زمانی و چگونه باید آن را پیادهسازی کنید و کجا و چگونه باید آن را اجرا کنید، در حد یک مسئله و جستوجو باقی میماند.
این ربات تنها با ذهنیت قبلی میتواند به جستوجو بپردازد
بسیاری از رباتهای اینچنین در درجهی اول هیچ ایدهای از وظیفهی خود ندارند، مگر اینکه از قبل به آنها بگویید چه چیزی درون کشو قرار دارد؛ یعنی برای پیدا کردن شیء موردنظر شما باید از قبل آن را بشناسند. مطابق ویدئو، در بخشی از آزمایش ربات مشاهده میکند که محتویات کشو طبق برنامهریزیهای او مرتب نشده است (کتابها در کشوی اول قرار ندارند) بنابراین با توجه به نداشتن ذهنیت قبلی جستوجو را ادامه نمیدهد.
فرآیند حل مسئلهی ساده برای انسان بدیهی است اما ممکن است برای ربات اینطور نباشد. حتی در این آزمایش هم، ربات چند مرتبه به دلایل مختلف و در تلاش برای رسیدن به اهداف خود شکست خورد. بااینحال فضایی برای پیشرفت وجود دارد.