ویدیوی بعدی
ویدیوهای پیشنهادی
چرا ژاپن ربات ها را در یک سیارک قرار می دهد

فضاپیمای ژاپنی موفق به فرود آوردن دو ربات کاوشگر بر سطح سیارکی دوردست شده است.
روز گذشته، یک کاوشگر فضایی ژاپنی موفق به نشاندن دو سطحنورد کوچک روی سیارکی در فاصلهی تقریبی 380 میلیون کیلومتری از کرهی زمین شد. نام این کاوشگر ژاپنی، هایابوسا 2 است و سطحنوردهای یادشده در این ماموریت، بهعنوان نخستین مورد از مجموعهی رباتهایی بهشمار میروند که این کاوشگر در چند ماه پیش رو، بر سطح این سیارک قرار خواهد داد.
سیارک مورد نظر پژوهشگران برای انجام ماموریت دشوار اخیر، Ryugu است. هایابوسا 2 توسط آژانس کاوشهای هوا و فضای ژاپن طراحی و اجرا شده است و وظیفهی اصلی آن نیز برداشتن نمونههایی از سیارک و فرستادن مواد آنها به زمین است. فضاپیمای فوق در سال 2014 میلادی و توسط یک راکت H-IIA به فضا پرتاب شد و در ماه ژوئن سال جاری نیز به سیارک ریوگو رسید. طبق برنامهریزی دانشمندان، کاوشگر در ماههای آینده چندین نمونه از سیارک را جمعآوری میکند و پس از آن در سال آیندهی میلای به کرهی زمین باز خواهد گشت.
هدف نهایی از تمام تلاشها این است که ما بتوانیم دانش بیشتری پیرامون ساختار این سیارک و سیارکهای مشابه آن به دست آوریم و بهطور دقیقتر، دریابیم که این نوع از اجرام کیهانی از چه موادی ساخته شدهاند. باور دانشمندان بر این است که سیارکهایی همچون ریوگو، بازماندههای دوران اولیهی منظومهی شمسی هستند و برای مدت زمانی در حدود 4.5 میلیارد سال، توانستهاند ساختار خود را تقریبا بدون تغییر حفظ کنند. از همین رو میتوانیم نتیجه بگیریم که چنین سیارکهایی میتوانند تصویر کلی مناسبی را از محلهی کیهانی خودمان و سیارههای موجود در آن فراهم کنند؛ یک تصویر کلی بهتر از زمانی که این سیارهها در نخستین مراحل تشکیل خود بودهاند. بررسی و کاوش تنها یک نمونهی کوچک از یک سیارک، اطلاعات ارزشمند بسیاری را دربارهی چگونگی پدید آمدن سیستم سیارهای فعلی در منظومهی خورشیدی در اختیار دانشمندان قرار میدهد.
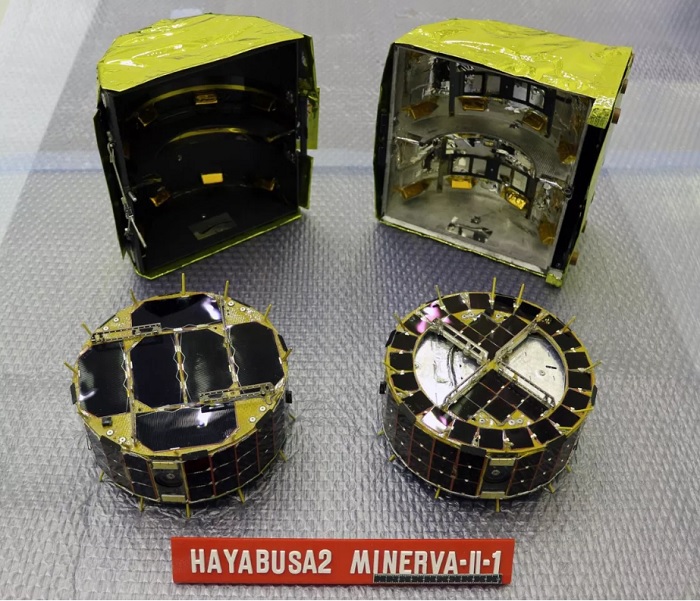
هایابوسا 2 پیش از جمعآوری نمونههای مورد نظر خود، سطح ریوگو را با رباتهایی تحت بررسی قرار خواهد داد. دو مورد از همین رباتها با نامهای Rover-1A و Rover-1B نیز روی سطح سیارک قرار گرفتهاند. هایابوسا 2 این رباتها را از بخشی با نام MINERVA-II1 و پس از نزدیک شدن به ریوگو و کاهش فاصله با آن و در نهایت رسیدن به فاصلهی 60 متری از سطح سیارک، رها کرد. رباتها دارای شکل استوانهای بوده و به شماری دوربین و حسگر دمای پیشرفته بهمنظور ثبت دقیق وضعیت سطح سیارک ریوگو مجهز شدهاند. تفاوت قابل توجه این سطحنوردها با مریخنوردهای مشابه ساختهشده توسط ناسا، در عدم تعبیهی چرخ روی آنهاست. این رباتها درواقع بهجای چرخهای متداول مریخنوردها، از موتورهای دورانی در ساختار خود بهره میبرند. موتورها امکان تغییر تکانه و تکانهای آنها توسط سطحنوردها را در گسترهی سطح سیارک فراهم میکنند.
از آنجایی که هدف این دو سطحنورد جمعآوری داده است، آنها باید توانایی انجام کاوش در محیطهای کمگرانش را نیز داشته باشند و البته این نکته در ساخت آنها لحاظ شده است. سیارک ریوگو حدود یک کیلومتر پهنا دارد و بهراحتی میتوانیم تشخیص دهیم که کشش گرانشی ایجادشده در آن چندان قوی نیست. به همین دلیل است که رباتها نمیتوانند از چرخهای معمولی و متداول برای فرودگرهای فضایی استفاده کنند؛ بهتعبیری میتوانیم بگوییم که رباتها روی سطح این سیارک بهحالت شناور میمانند. راهکاری که داشمندان پیرامون کنترل تکانهای دستگاه در نظر گرفتهاند، احتمالا سطحنوردها را قادر میسازد که سطح سیارک ریوگو را بهصورت خودکار و بدون انحراف از مسیر تعیینشده مورد کاوش و نمونهبرداری قرار دهند.