ویدیوی بعدی
ویدیوهای پیشنهادی
Dyret؛ رباتی که روی برف و یخ راه میرود

Dyret؛ رباتی که روی برف و یخ راه میرود
ربات چهارپایی به نام Dyret طراحی و تولید شده است که میتواند بهراحتی و بدون لیز خوردن، روی هر سطحی از جمله برف و یخ راه برود و تعادل خود را حفظ کند.
آیا رباتها میتوانند روی سطوح لغزنده مانند برف و یخ راه بروند و تعادل خودشان را حفظ کنند؟ رباتچهارپا به نام Dyret میتواند بهراحتی روی سطوح مختلف از جمله برفی و یخ راه برود و زمین نخورد. شاید وقتی برای اولین بار Dyret را ببینید، از طراحی عجیب آن کمی شگفتزده شوید؛ ولی مهارتهای این ربات چهارپا میتواند نظر شما را عوض کند. Dyret بامهارت عجیبی روی سطوح لغزنده راه میرود و نهتنها زمین نمیخورد، بلکه سرعت خوبی دارد و سریع راه رفتن روی آن سطح را یاد میگیرد. جالب است بدانید این ربات به خودش راه رفتن را آموزش میدهد و به گفته محققان رباتیک، Dyret جزو رباتهای تکاملی است.
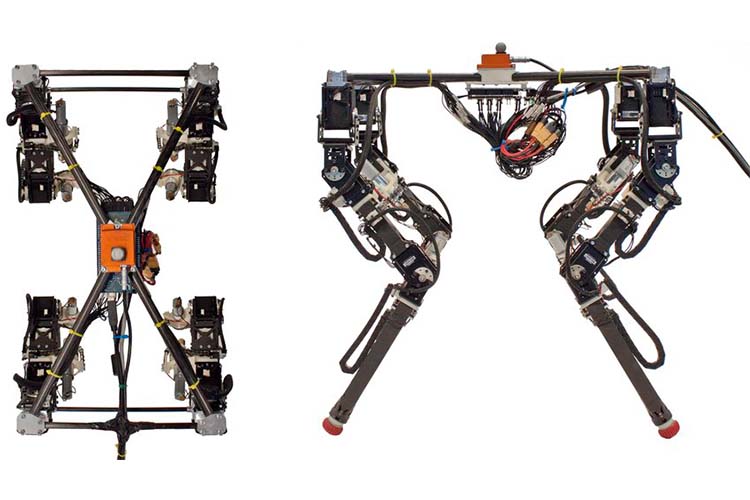
رباتهایی مانند Cassie که دارای دو پا است یا سگ ربات SpotMini به لطف الگوریتمهای دقیق، بهسرعت میتوانند در حرکت کردن مسلط شوند. ولی این ربات جدید با بقیه رباتهای نسل قبلی تفاوت دارد. ربات Dyret یاد میگیرد روی یک سطح خاص، مثلا فرش یا یخ با روش آزمون و خطا گام بردارد و گامهایش را با محیطی که در آن قرار گرفته، سازگار میکند. رباتهای صنعتی، معمولا با کمک تغییر در کدها و الگوریتمهایشان میتوانند برای راه رفتن تنظیم شوند؛ ولی این ربات بهصورت اتوماتیک خود را با شرایط تنظیم و سازگار میکند. بازوهای ربات با توجه به شرایط محیطی میتوانند بهصورت اتوماتیک کوتاه یا بلند شوند و همین مسئله باعث حفظ تعادل ربات خواهد شد. در اصل Dyret مرکز ثقل خودش را با توجه به سطحی که روی آن قرار دارد و با تغییر طول دستها و پاهایش تنظیم میکند و همین دلیل در دسته رباتهای تکاملی قرار میگیرد. در نهایت باید بگوییم این ربات میتواند بهراحتی روی سطوح مختلف با اقتدار و بدون نیاز به کمک راه برود و تعادل خود را حفظ کند.
سیستمهای مصنوعی کاملا شبیه به موجودات زنده، در حال تکامل هستند و میتوانند از قواعد انتخاب طبیعی همانند موجودات زنده پیروی کنند. این ساختار و ارگانیزمهای غیر زنده همانند موجودات زنده میتوانند دچار جهش ژنتیکی شوند و تکامل پیدا کنند و با محیط اطراف خود در تعامل بهتری قرار گیرند. برای اینکه ربات Dyret بتواند بهدرستی راه برود، محققان در طراحی آن هشت راهکار مختلف را مورد بررسی قرار دادند که یکی از این راهکارها، تغییر طول بازوی ربات برای حفظ تعادل در حین راه رفتن است. البته محققان از همه این راهکارها به شکلی در طراحی خود استفاده کردهاند و محصول نهایی ترکیبی از این روشها با یکدیگر است.
Dyret تلاش میکند تا اندامهای خودش را به شکلی تنظیم کند که بتواند بهراحتی روی هر سطحی راه برود. وقتی روی هر سطحی قرار میگیرد بهسرعت به خودش یاد میدهد گامهایی متعادل و بدون لغزش روی آن سطح بردارد و بهسرعت راه رفتن روی سطح جدید را یاد میگیرد. سنسوری در قسمت بالایی ربات تعبیه شده است که وضعیت حرکت کردن پایدار و در حال تعادل ربات را رصد میکند. راهکارهای خوب همیشه امتیاز و نمره خوبی کسب میکنند. نیگارد معتقد است:
همیشه شانس بیشتری برای طراحی و ساخت رباتی با تعادل بیشتر و سریعتر وجود دارد.
در نهایت با کنار هم قرار دادن همه این موارد، باید بگوییم که Dyret، میتواند روی هر سطحی بهراحتی و در تعادل کامل و بدون اینکه لیز بخورد راه برود و خودش را با محیطها و شرایط مختلف سازگار کند. حتی اگر این شرایط، وضعیتی مثل کم شدن شارژ باتری ربات باشد، باز هم Dyret راهکاری برای آن در نظر میگیرد و با کوتاه کردن پاهایش تعادل و سرعت حرکت خود را حفظ میکند. این ربات هر ضعفی را به قدرت تبدیل میکند و تحت هیچ شرایطی در برابر شرایط نامناسب متوقف نمیشود.